Where robots meet operators
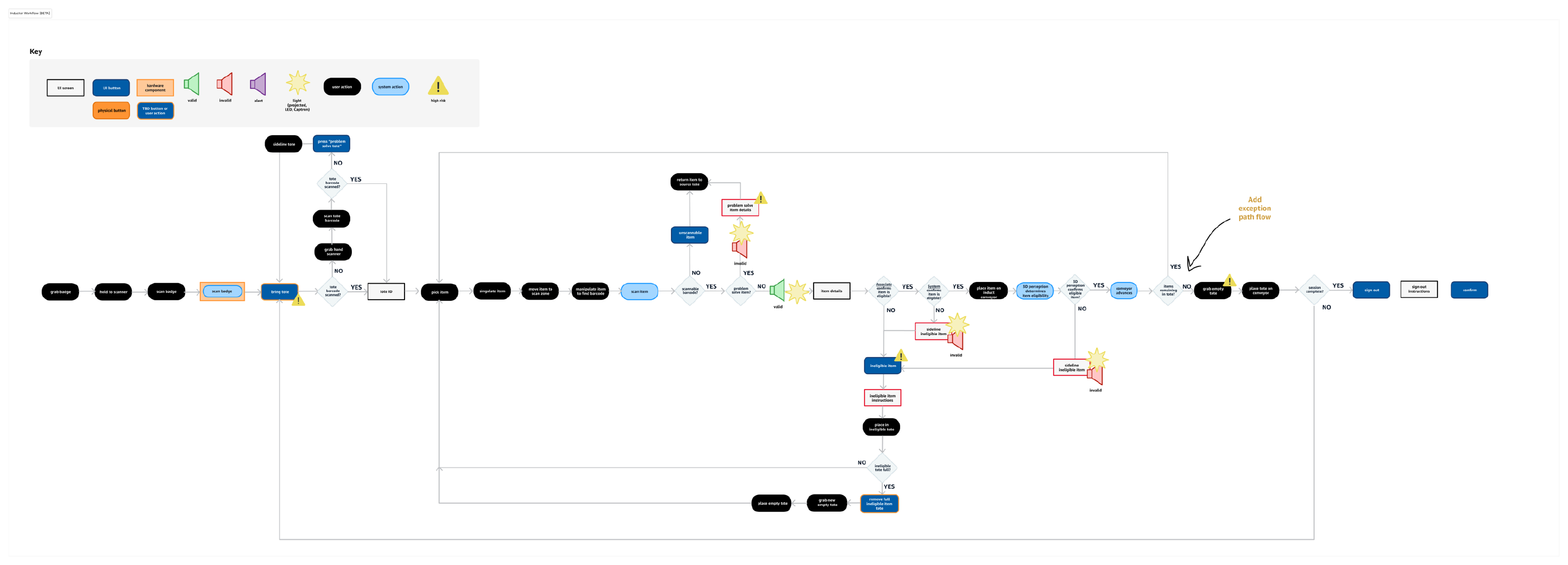
Vulcan automates part of the stow workflow. While the robot stows items into pods, a human still has to feed it — scanning each item, checking eligibility, and routing the ones the robot can't safely handle.
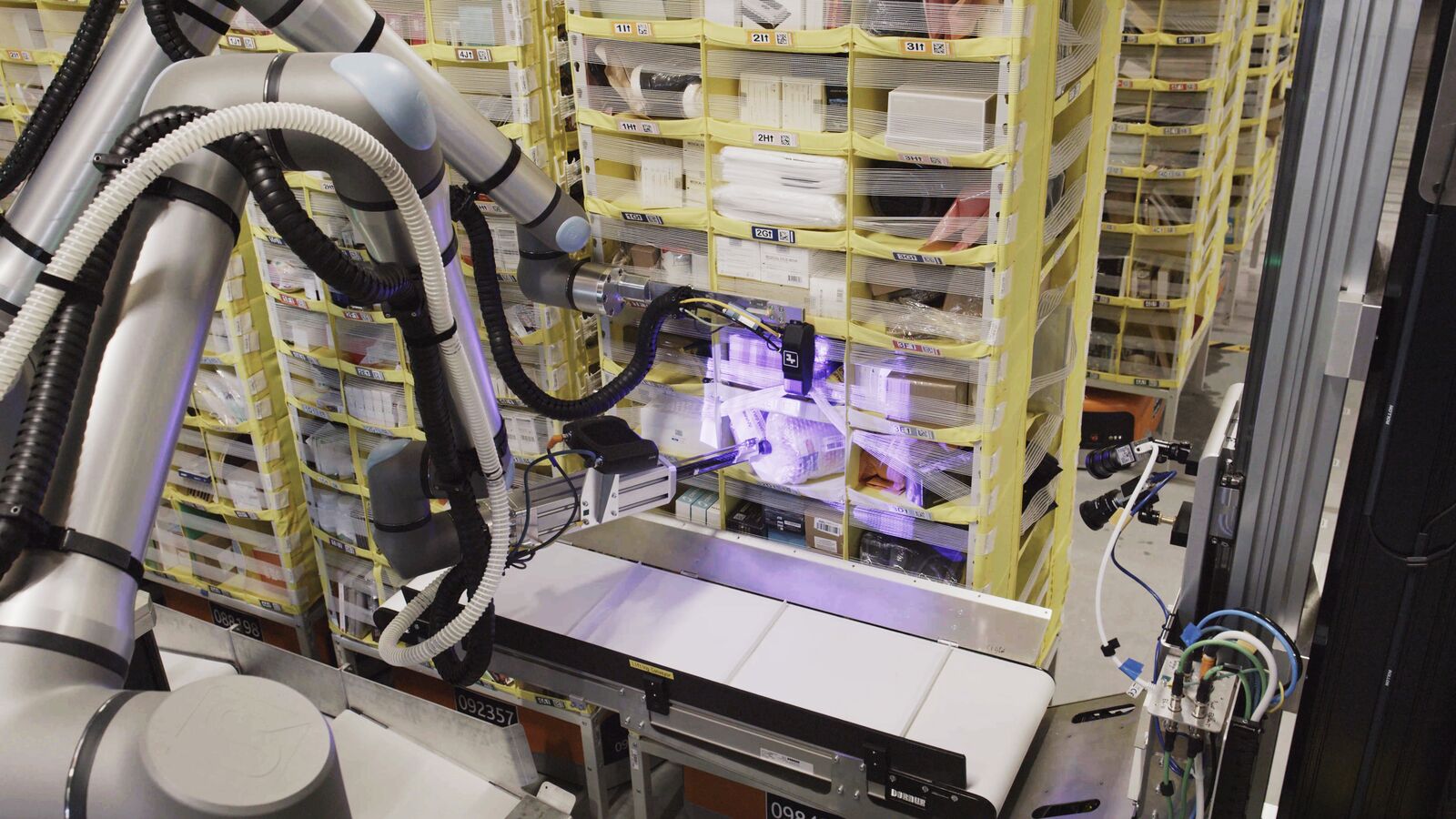
The robot's job
Vulcan stows inventory into the top and bottom rows of storage pods so associates can stay in their power zone — no ladders, no bending.
The operator's job
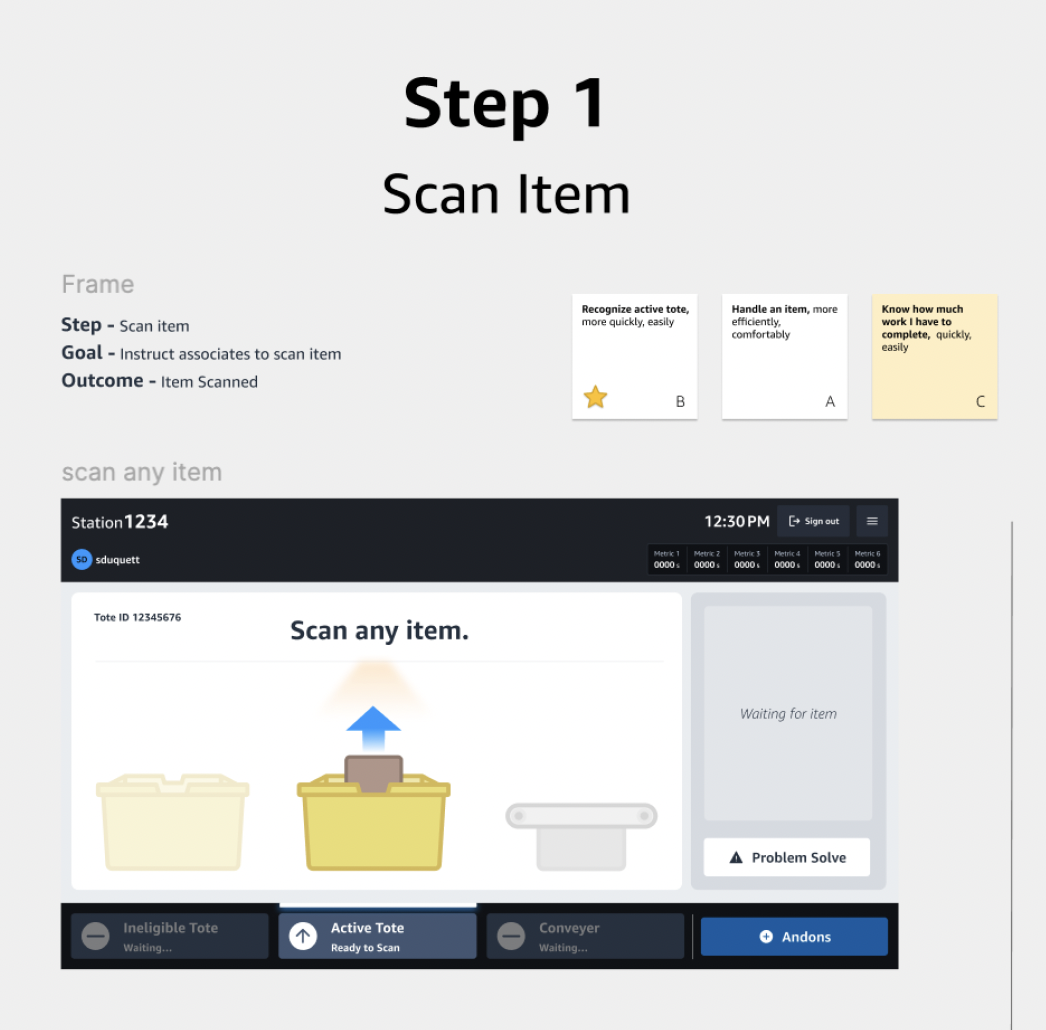
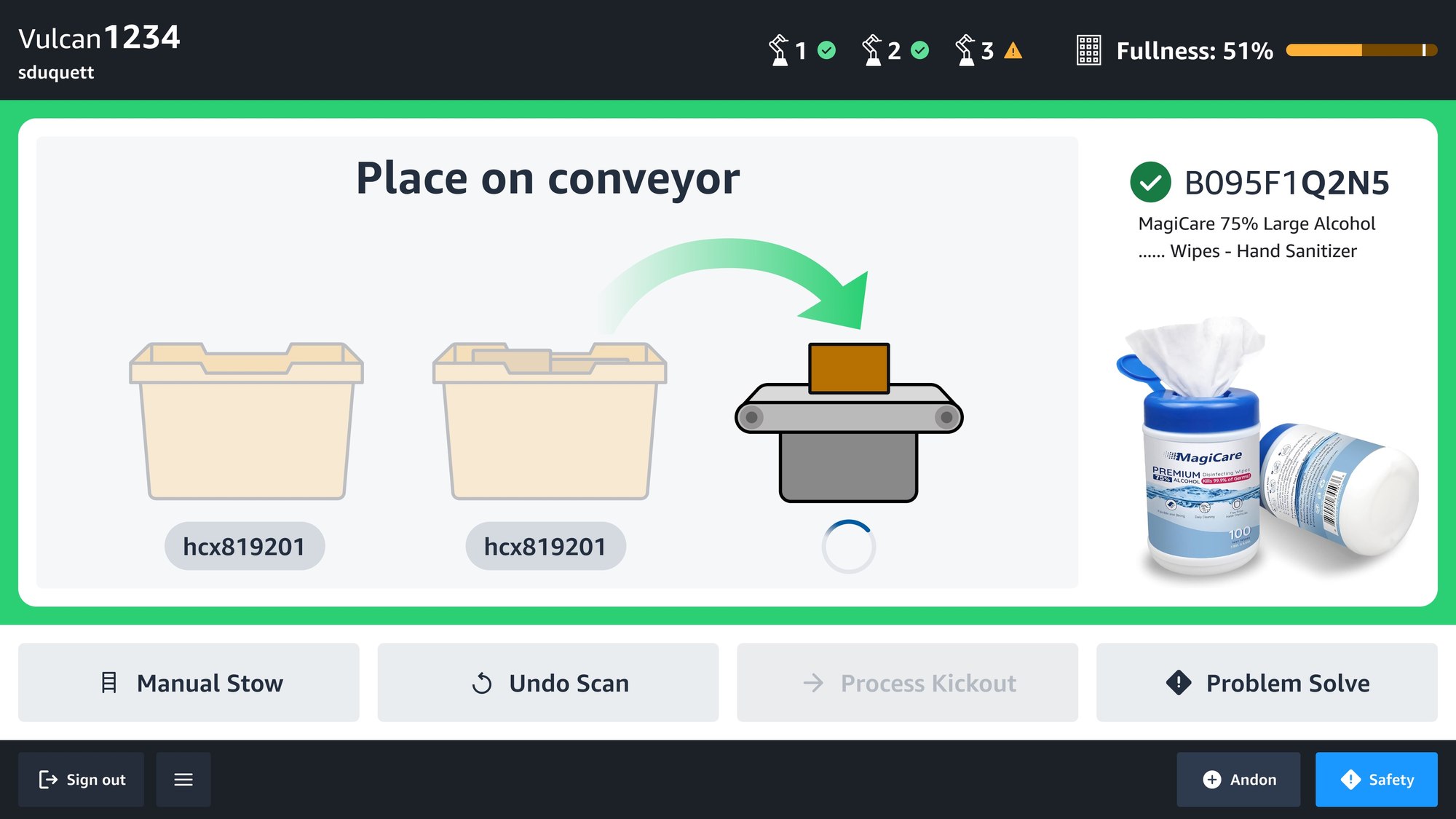
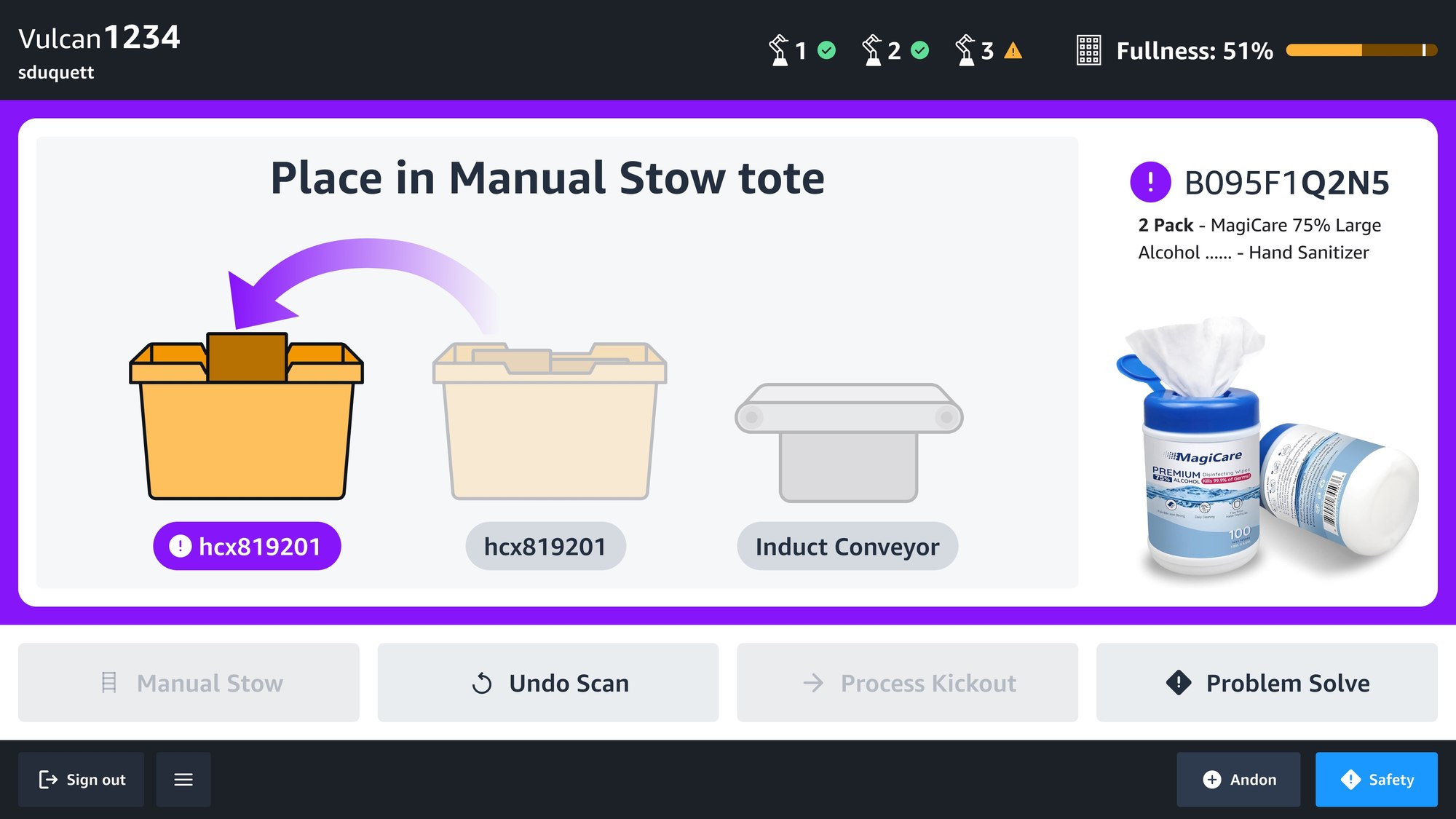
A human feeds the robot: scans each item, checks eligibility, and re-routes the ones Vulcan can't safely or successfully stow.
Why UX matters here
Every item is a decision: is this Vulcan-eligible? Is it damaged? Is the barcode readable? Get it wrong and a defect lands on the storage floor.

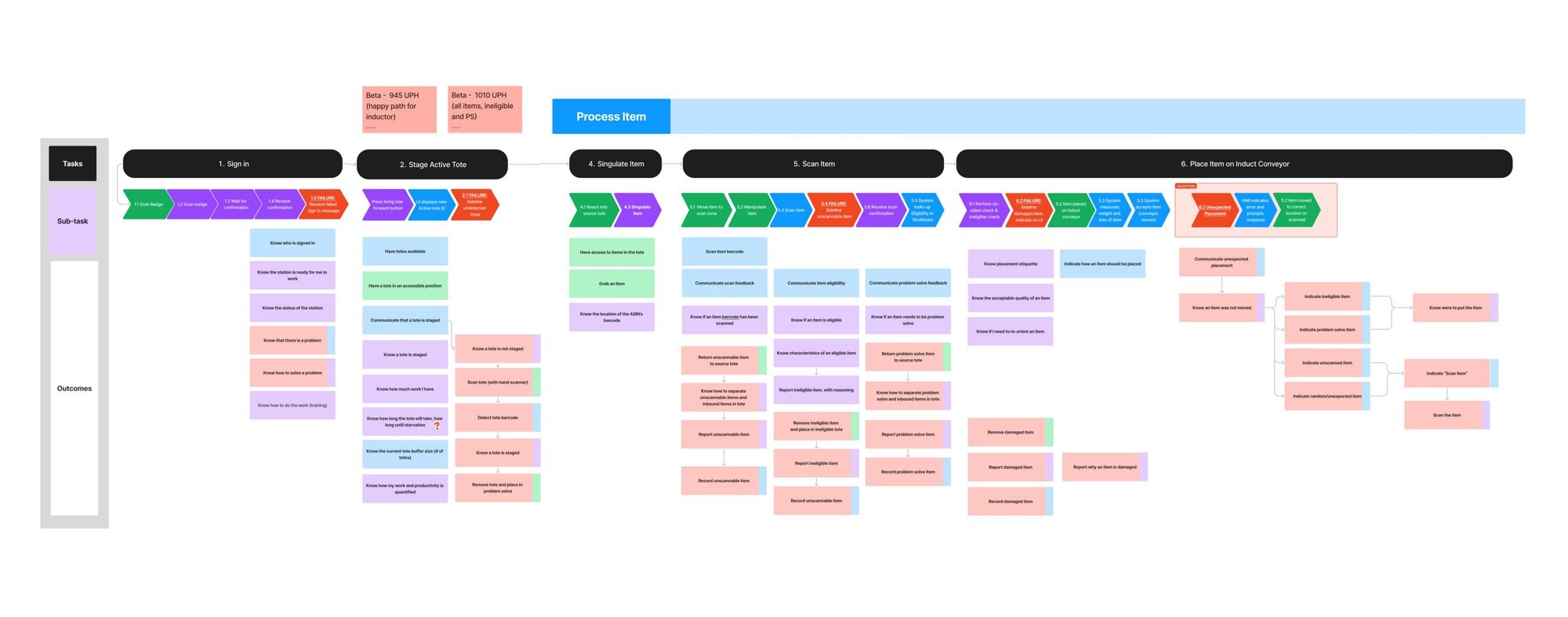
I led the operator-side UX for Vulcan Stow — building a shared outcome framework (CXOs) that made every human task and every exception path explicit across Amazon Robotics programs.